-
製品紹介動画
-
多品種のワークを一つのハンドで吸着搬送
サイズがバラバラな段ボールや
複雑な形状のワークの吸着などに最適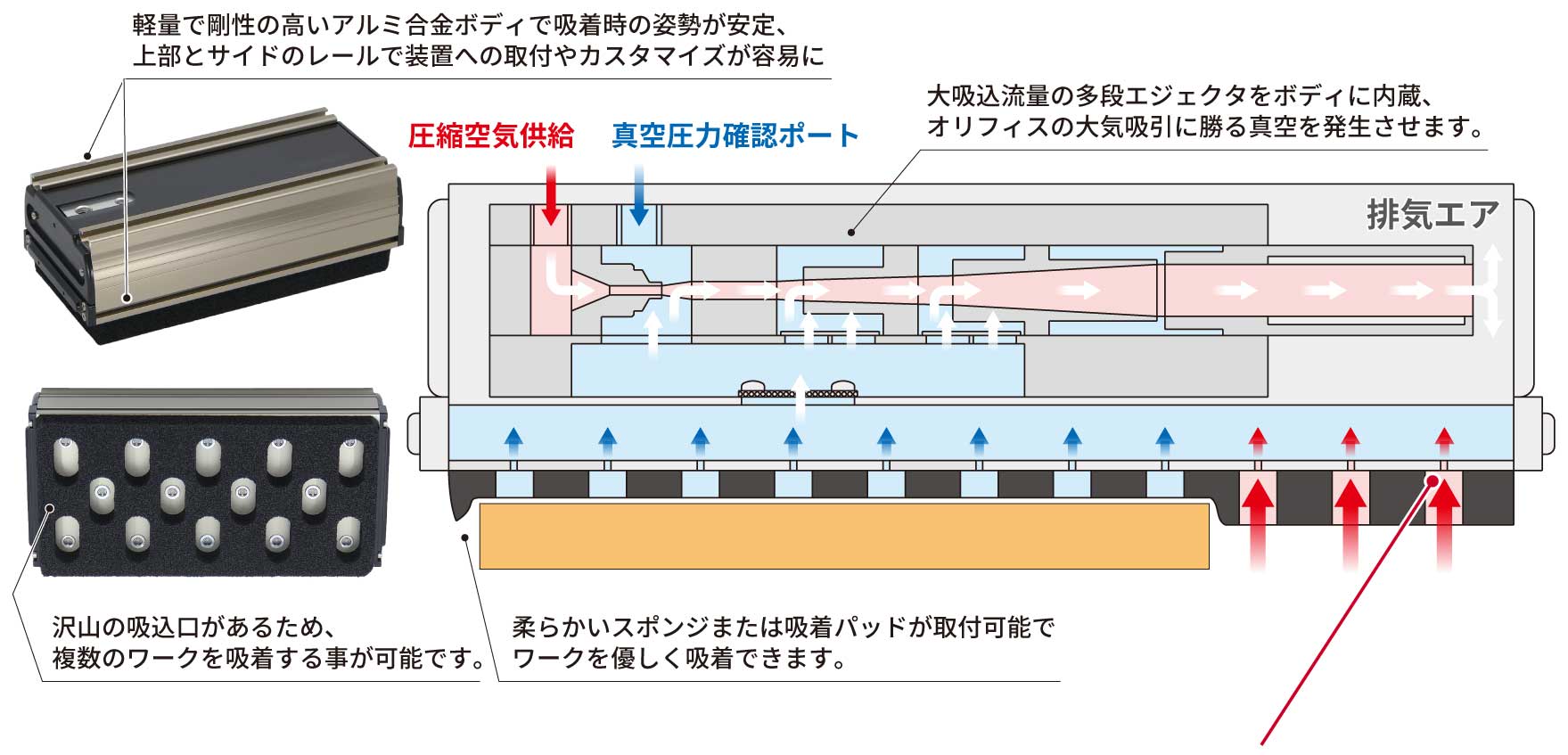
未吸着箇所の大気吸引をオリフィスで絞り込み、ハンド内部の真空圧力低下を軽減することで、
吸着していない箇所があってもワークの吸着が可能になります。
ワークのサイズがバラバラな段ボールや複雑な形状のワークの吸着などに最適です。

段ボール/パレットの吸着

成形品の吸着
-
豊富なサイズ展開で大小様々なワークの吸着が可能
サイズバリエーション

パレッチャー
130×280mm, 130×416mm, 130×560mm
小型パレッチャー
40×40mm, 60×120mm, 110×110mm, 110×180mm -
当社の様々な吸着パッドが取付可能
スポンジタイプにはクロロプレン、EPDMから選択可能

多段じゃばらパッド
PLG series
3段じゃばらパッド
PCG series
スポンジパッド
-
ロボットフランジでロボットや装置の取付が容易に
偏角吸収バッファフランジでワークの偏りを吸収可能
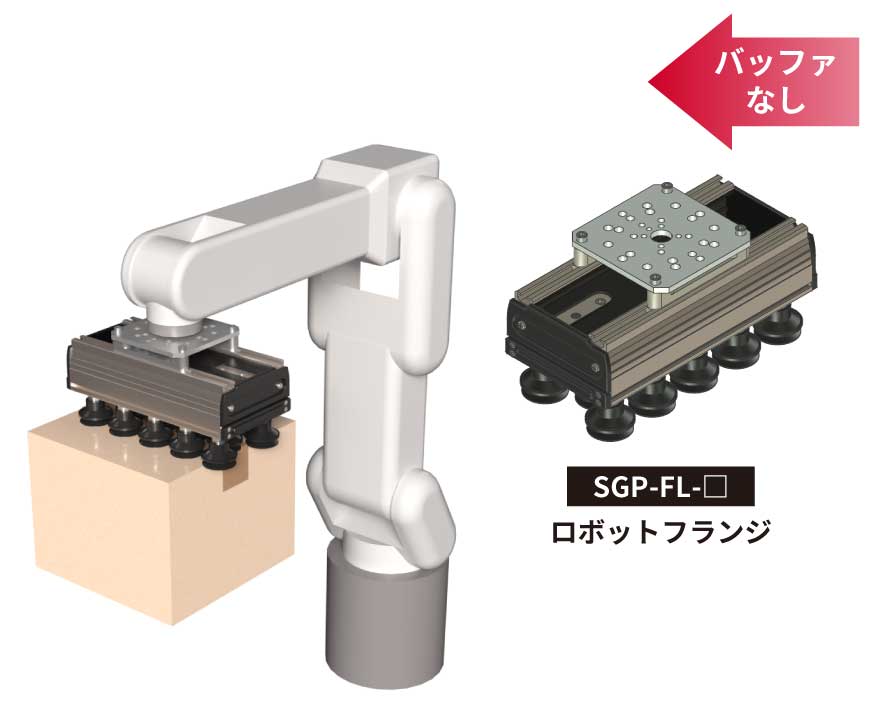
様々なロボットの取付部に適合します。
SGP-FL-Aの場合、P.C.D.100/80/50/31.5
SGP-FL-Bの場合、P.C.D.90/63/40
球軸とバッファが3次元的に稼働し、吸着面の角度を吸収できます。
ワークに対して角度合わせをせずに吸着することが可能となり、内容物がランダムに偏りやすい重なったワークに非常に有効です。
パレッチャー(ロボット用真空グリッパー)
SGP
Series









